百度联手TI,抢占智能驾驶新高地

在互联网巨头频频抢占智能驾驶新高地时,百度Apollo与Texas Instruments德州仪器(以下简称“TI”)于12月22日,宣布达成“自动驾驶计算平台ACU战略”合作:将TI的车规级处理器纳入Apollo软硬一体的自动驾驶产品设计中,意在为行业提供领先一代的汽车智能化产品。
其实双方的合作,早在12月8日就为外界所知。在Apollo2020生态大会上,百度发布的支持高阶智能驾驶ANP和自主泊车AVP功能的计算平台ACU“四喜”,其车规级芯片主要来自 TI。推荐阅读:智能汽车
(支持高阶智能驾驶ANP和自主泊车AVP功能的计算平台ACU“四喜”)
TI的TDA4处理器系列,具备片上数据分析能力,能与视觉预处理加速器相结合,于Jacinto™7架构上帮助汽车制造商设计驾驶辅助系统及下一代半自动和自动驾驶系统,使之性能更高效。
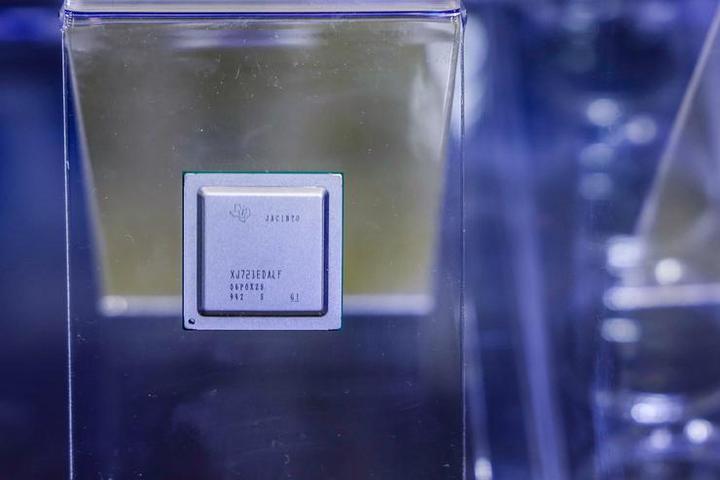
(德州仪器(TI)基于Jacinto™7开发的TDA4车规级处理器)
值得注意的是,此次合作战略目标是:以绝对领先的泊车为起点,逐步实现城市全场景自动驾驶。推荐阅读:智能汽车
“这套方案,将在泊车及行驶甚至在城市道路中,帮助私家车快速的落地使用。”百度智能驾驶事业群组首席产品架构师郭阳强调。
由于城市人口多,交通路况复杂,Apollo自动驾驶在城市场景的应用上对传统的智驾方案做出差异性的改变:在摄像头及传感器的定制上会逐量增多,甚至会考虑添加如毫米波雷达之类的传感器。
在Robotaxi相关技术上,百度已经进行了五六年的探索,同时也在多地进行了Robotaxi的运营。而L4自动驾驶技术向下降维的释放,则可积累面向城市AI算法方面的数据,在计算单元领域得以进行进一步的实践。
(百度智能驾驶事业群组首席产品架构师郭阳)
至于在ACU(五仁)时是跟赛灵思合作,为何这次做出不同的选择 ?
郭阳回应道,Apollo第一代产品设计主要因为当时研发的重点在泊车域,希望它能够快速地上车。赛灵思FPGA灵活性强,能满足当时的需求。
而当行车域和泊车域的整体设计越发成为车企行业趋势时,一个高性能支撑平台适用于自动驾驶的车规级的能量产且比较安全的产品较为稀缺。
这种情况下,百度推出它的第二代产品:把ANP和 AVP做到一块,这个过程需要一个算力更强大、更加符合在现阶段要求的计算单元。
提到在apollo的ACU量产以后会被用到具有哪个级别功能的车上。郭阳表示,考虑在不同场景下用户体验的需求不同,Apollo发布的ANP的功能是L2-L4的融合。与车厂合作的AVP也涉足到L2-L4的场景。推荐阅读:智能汽车
“真正行驶或者巡航的过程实际上用的是L4级,若出现突发情况需要人为介入接管才释放L2级功能”。
有意思的是,Apollo目前需30Tops的算力即可满足ANP的产品完整地在城市级的实现,而特斯拉则需144个Tops来解决视觉问题。
一方面,基于Apollo有百度高精地图的辅助。另一方面是特斯拉缺乏在中国境内足够的运营的经历,没有像Apollo这样足够的数据的累积,特斯拉无法做到在面对复杂车路情况时提前给出精准预判。推荐阅读:智能汽车